- 保有技術
CSM掘削精度計測システム
CSM工法の掘削精度計測システムの開発
~連続地中壁の精度確認方法の確立~
テクノス株式会社は、株式会社熊谷組(所在地:東京都新宿区)、株式会社ファテック(所在地:東京都新宿区)、多摩川精機株式会社(所在地:長野県飯田市)と共同で、CSM(Cutter Soil Mixing)工法※1における掘削機の地中での位置を確認する「掘削精度計測システム」を開発しました。
これにより、従来に比べてより精度の高い連続地中壁の施工が可能になります。
- ※1.CSM工法:土留めや遮水のための連続地中壁をつくる工法のひとつ。掘削機の回転カッターで地盤を掘削し、掘った土と、カッターの先端から噴射されるセメントミルクを地中で練り混ぜてソイルセメント壁をつくり、固まる前にH形鋼などの芯材を建込む。
-
1.開発の背景と目的
従来の工事では、掘削中の掘削機の正確な位置は、運転者が傾斜計やジャイロ(角速度計測器)を見ながら判断しており、その精度は運転者の技量に影響される傾向があります。また、傾斜計やジャイロは、計測時点での傾きや回転は確認できますが、掘削機の横ずれや水平方向の回転誤差を継続して正確に計測することができません。そのため、掘削後に芯材を入れるまで、精度の高い掘削位置の計測が困難で、掘削後に修正が必要な場合には多大な時間と費用を要していました。
CSM工法では、掘削の修正作業が生じないよう、施工中の掘削機の位置をより正確に把握することが不可欠です。そこで4社は、掘削途中段階において随時適切な頻度で掘削機を地中の掘削位置に留めたまま、短時間で現在の掘削機の位置を正確に計測する技術を開発しました。
-
2.開発システムの概要
新たに開発した「掘削精度計測システム」は、ジャイロと加速度計を組み合わせたセンサーを用いて、掘削中に掘削機の両端位置を座標によって示し、高い精度で機械の位置を確認することが可能です。
センサーには、3軸のジャイロと3軸の加速度計を組み合わせた計測装置(TUG-NAVI®:多摩川精機(株)製のジャイロ式管路計測装置)を採用し、計測装置の移動中の振動や回転を抑え、かつ高い精度で移動距離を計測するエンコーダ(位置検出器)を組み合わせています。このセンサーから得られた情報を積分することにより、相対座標が求められます。
また、さらに計測の精度を上げるためには、ノイズとなる振動や回転を抑え、短時間でセンサーを移動させる必要があります。そこで本システムでは、緊張させた2本のワイヤー間でセンサーを上下移動させる、新たなウインチシステムを製作しました。測定は、掘削機の両肩部に接続できるようワイヤーを設置し、掘削途中に随時掘削機を静止させて、センサーを移動させて計測を行います。
これにより、安定して地中の掘削機の2点の座標が計測可能となります。
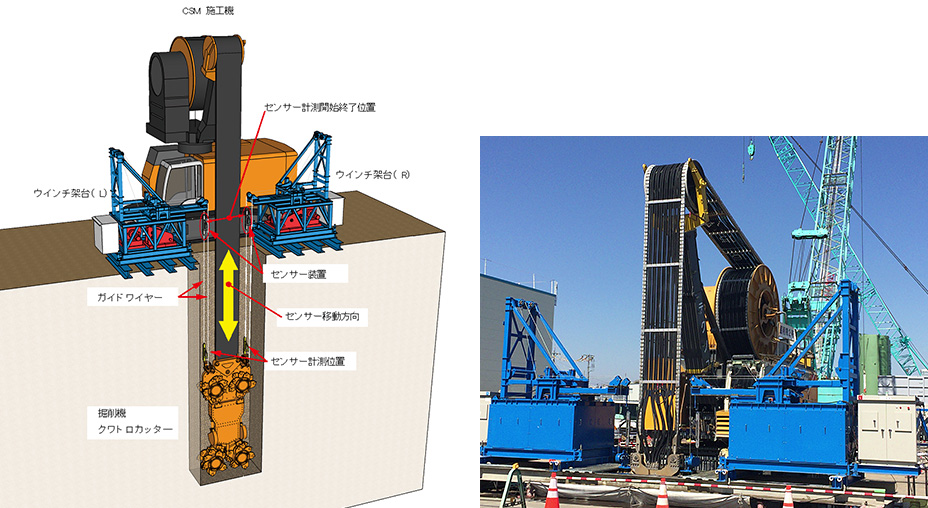
図-1 CSM工法掘削精度計測システム概要図
-
3.実験成果
システム検証実験の精度検証結果を以下に示します。この実験は、装置の実際の経路をレールに沿って設定し、実際にセンサーを移動した結果を測量結果と比較したものです。
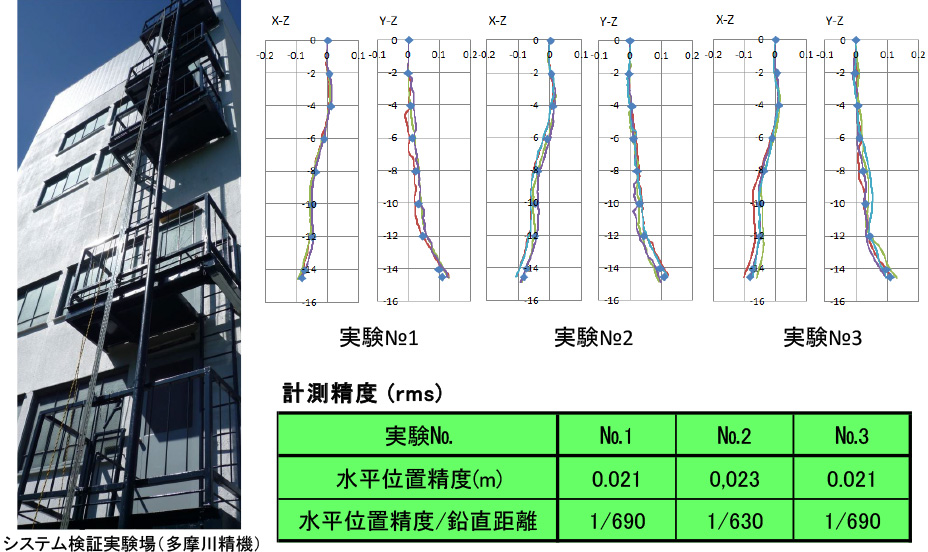
図-2 精度検証結果
-
4.今後の展開
今後は「掘削精度計測システム」の現場適合の確認をするため、実際の施工現場での検証を行う予定です。開発4社は本技術の普及のため、積極的に本システムの利用を進め、CSM工法の掘削精度を高めていきます。また、システムの利便性を高めるため、引き続き改良を進め、広く普及させていく方針です。
-
別 紙
システム検証実験について開発では、4回の検証実験を実施しました。その中で掘削検証実験では、写真-1にあるように22mの掘削深さまで施工し、センサーによる計測を実施しています。この実験では掘削位置を固定し、上部のシーブ位置を移動して掘削位置のずれを設定し、計測しました。

写真-1 掘削実験状況
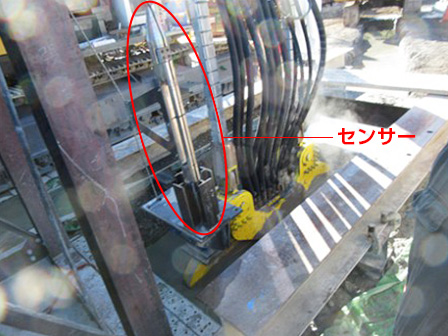
写真-2 センサー装着状況
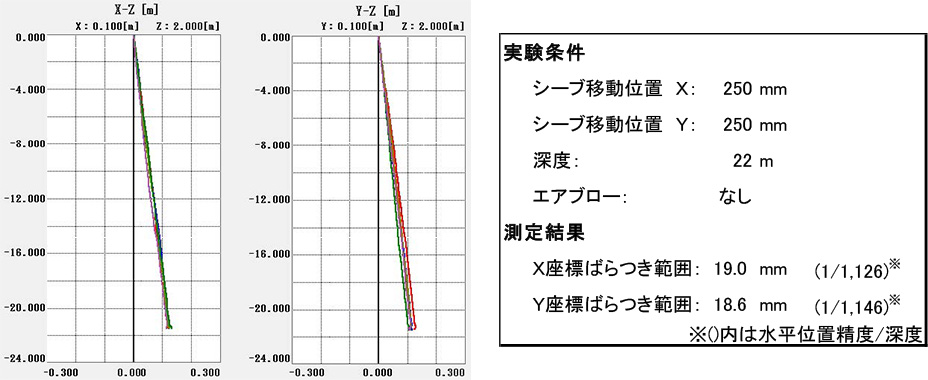
図-3 掘削実証実験計測例 X-Y 250-250mm移動時の結果
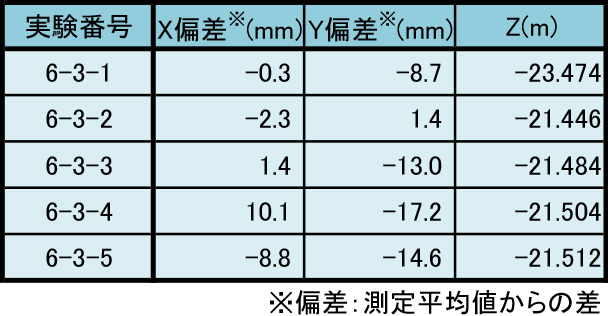
表-1 掘削実証実験計測例 X-Y 250-250mm移動時の結果
X-Y 250-250mm移動時の結果は図-3および表-1にある例では1/1,000以上の精度が確認できました。気中と異なり、粘性の高い泥土中の移動であるため、センサーの振動や回転が抑えられ、より精度が高く計測できていることなどが影響していると思われます。
工場総合試験では、写真-3~4にあるように実際のシステムの動作確認を地上で行っています。

写真-3 システム動作試験状況

写真-4 システム全景
工場基礎実験、CSM工法掘削実証実験、システム動作試験を経て、実験結果にある通り、1/600以上の精度を確認しています。
- 5.1 実験履歴
- ①工場基礎実験 平成29年10月23日~25日
- センサーの性能評価を目的とした検証実験
- ②掘削実証実験 平成29年12月6日~7日
- 掘削機に搭載し、期待した性能が出せるかの確認実験
- ③システム検証実験 平成30年8月30日
- 改良したセンサーの工場での確認実験
- ④工場総合試験 平成30年10月16日~19日
- ウインチとソフトウェアの総合確認実験