- OUR PROPRIETARY TECHNOLOGIES
CSM Excavation Accuracy Measurement System
Development of the CSM Method, an excavation accuracy measurement system
Establishment of Accuracy Verification Method for Underground Continuous Walls
TECHNOS CO., LTD., in collaboration with Kumagai Gumi Co., Ltd. (Location: Shinjuku-ku, Tokyo), FATEC Co., Ltd. (Location: Shinjuku-ku, Tokyo), and TAMAGAWA SEIKI CO., LTD. (Location: Iida-city, Nagano), have developed an excavation accuracy measurement system to confirm the underground position of the excavator in the ground while using the CSM (Cutter Soil Mixing)*1 Method. This will enable the construction of underground continuous walls with higher accuracy than before.
- *1.CSM Method: A method of constructing underground continuous walls for earth-retaining and water-blocking purposes. The ground is excavated with a rotary cutter, and the excavated soil and cement milk sprayed from the tip of the cutter are mixed underground to form a soil-cement wall, which is built with H-shaped steel or other core materials before it hardens.
-
1.Background and purpose of the development
In conventional construction work, the exact position of an excavator while excavating underground is determined by the operator by looking at an inclinometer and a gyroscope (an angular and velocity measuring device), and the accuracy tends to be influenced by the skill of the operator. Inclinometers and gyroscopes can check the tilt and rotation at the time of measurement, but they cannot continuously and accurately measure the lateral displacement and horizontal rotation error of the excavator. As a result, it is difficult to measure the excavation position with high accuracy until the core material is inserted after excavation. This requires a great deal of time and money when corrections are necessary after excavation.
In the CSM Method, it is essential to know the position of the excavator more accurately during drilling so that corrective work will not be needed afterward.
In order to solve this problem, the above-mentioned four companies have developed a technology that accurately measures the current position of the excavator in a short period of time, while keeping it in the underground excavation position, at any appropriate frequency during the excavation phase.
-
2.Outline of the developed system
The newly developed Excavation Accuracy Measurement System uses a sensor combining a gyroscope and an accelerometer to indicate the positions of both ends of the excavator utilizing coordinates during drilling, making it possible to confirm the position of the machine with high accuracy.
The sensor uses a measuring device (TUG-NAVI®: a gyroscopic pipeline measuring device manufactured by TAMAGAWA SEIKI CO., LTD.) that combines a 3-axis gyroscope and a 3-axis accelerometer. It is combined with an encoder (a position detector) that suppresses vibration and rotation while the measuring device is moving and measures the distance traveled with high accuracy. By integrating the information obtained from this sensor, the relative coordinates can be obtained.
In order to further improve the accuracy of the measurements, it is necessary to move the sensor in a short period of time while suppressing the vibrations and rotations that would otherwise create noise. For this reason, we have developed a new winch system that moves the sensor up and down between two taut wires. For measurement, wires are installed so that they can be connected to both shoulders of the excavator. It can be brought to a halt on demand during excavation, and the sensor is moved to take measurements. This makes it possible to measure the coordinates of the two points of the excavator in the ground in a stable manner.
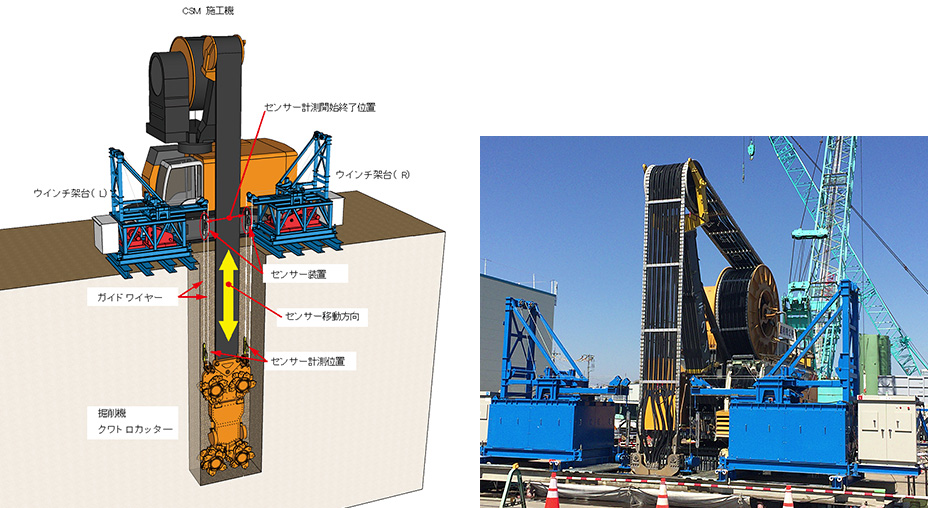
Figure-1 Schematic diagram of the CSM Method excavation accuracy measurement system
-
3.Experimental results
The results of the system accuracy verification test are shown below. For the experiment, the actual path of the device was set along the railway, and the results of the actual movement of the sensor were compared with the surveying results.
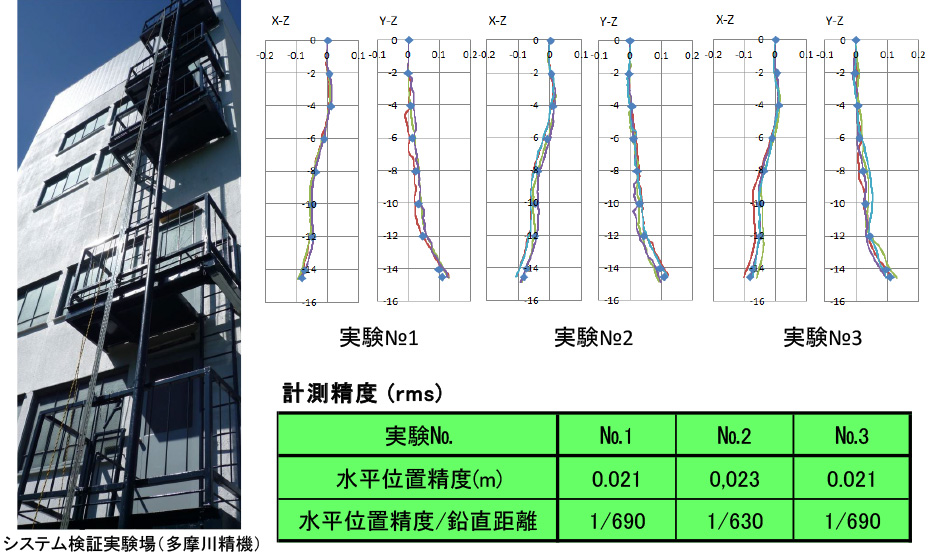
Figure-2 Accuracy verification results
-
4.Our future plan
Our future plan is to conduct verification tests at actual construction sites to confirm whether the Excavation Accuracy Measurement System works properly at the site. The development team made up of the four companies will actively promote the use of this system in order to spread the technology and further improve the drilling accuracy of the CSM Method. In addition, we will continue to improve the system to make it more convenient and widely available.
-
Appendix
System verification testsDuring the development phase, four demonstration experiments were conducted. In the excavation accuracy test as shown in Photo-1, we excavated to a depth of 22 meters below ground level and measured the position with the sensor. In this test, the excavation position was fixed, and the upper sheave position was moved to set the excavation position shift, and then it was measured.

Photo-1: Excavation accuracy test
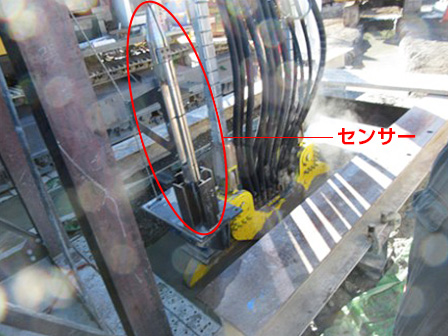
Photo-2: With sensor installed
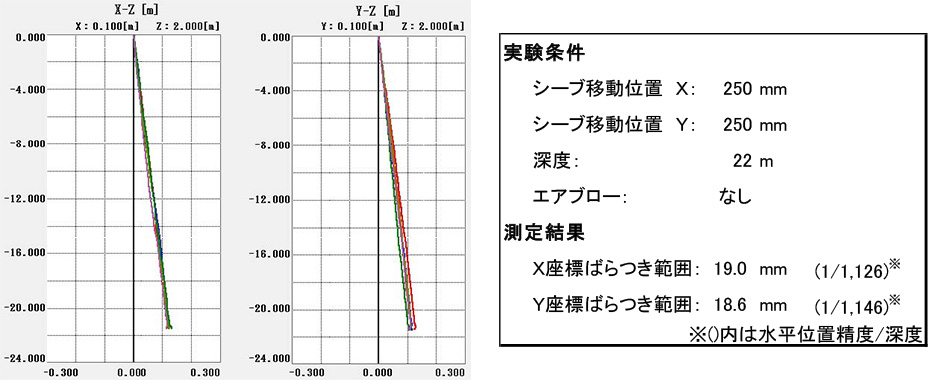
Figure 3 Drilling demonstration experiment: Results from X-Y 250-250 mm movement
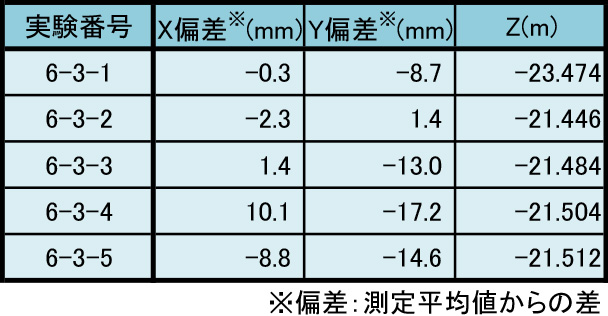
Table 1 Drilling demonstration experiment: Results from X-Y 250-250mm movement
In the results obtained from the X-Y 250-250 mm movement as shown in Figure-3 and Table-1, an accuracy of more than 1/1,000 has been confirmed. Unlike on the ground, the movement in highly viscous mud underground suppresses the vibration and rotation of the sensor, which is thought to be the reason for the higher accuracy of the measurement.
In the comprehensive factory test, the actual operation of the system has been checked on the ground as shown in Photo-3 and Photo-4.

Photo-3: System operation test

Photo-4: Overall view of the system
Through basic factory experiments, CSM Method excavation demonstration tests, and system operation tests, we have confirmed an accuracy of over 1/600 as shown in the test results.
- 5. 1 Experimental history
- 1) Basic factory experiments: October 23-25, 2017
- Verification tests to evaluate the performance of the sensor
- 2) Excavation verification experiments: December 6-7, 2017
- Experiments to see if the expected performance can be achieved when the sensor is mounted on an excavator
- 3) System verification experiments: August 30, 2018
- Factory verification test of the improved sensor
- 4) Comprehensive factory tests: October 16-19, 2018
- Comprehensive checklist tests of winch and software